



4. Podstawowe funkcje oprogramowania BMS
l Funkcja pomiaru
(1) Pomiar podstawowych informacji: monitorowanie napięcia akumulatora, sygnału prądowego i temperatury akumulatora. Podstawową funkcją systemu zarządzania akumulatorem jest pomiar napięcia, prądu i temperatury ogniw akumulatora, co stanowi podstawę wszystkich obliczeń na najwyższym poziomie i logiki sterowania systemu zarządzania akumulatorem.
(2) Wykrywanie rezystancji izolacji: Cały układ akumulatorowy i układ wysokiego napięcia muszą zostać sprawdzone pod kątem izolacji przez system zarządzania akumulatorem.
(3) Wykrywanie blokady wysokiego napięcia (HVIL): służy do potwierdzenia integralności całego układu wysokiego napięcia. W przypadku uszkodzenia integralności obwodu układu wysokiego napięcia aktywowane są środki bezpieczeństwa.
jaFunkcja estymacji
(1) Oszacowanie SOC i SOH: sedno i najtrudniejsza część
(2) Równoważenie: wyrównuje się nierównowagę SOC x pojemność między monomerami za pomocą układu równoważącego.
(3) Ograniczenie mocy akumulatora: moc wejściowa i wyjściowa akumulatora jest ograniczona przy różnych temperaturach SOC.
jaInne funkcje
(1) Sterowanie przekaźnikiem: w tym główny +, główny-, przekaźnik ładowania +, przekaźnik ładowania -, przekaźnik wstępnego ładowania
(2) Kontrola termiczna
(3) Funkcja komunikacyjna
(4) Diagnostyka usterek i alarmowanie
(5) Działanie odporne na błędy
5.Podstawowe funkcje oprogramowania BMS
jaFunkcja pomiaru
(1) Pomiar podstawowych informacji: monitorowanie napięcia akumulatora, sygnału prądowego i temperatury akumulatora. Podstawową funkcją systemu zarządzania akumulatorem jest pomiar napięcia, prądu i temperatury ogniw akumulatora, co stanowi podstawę wszystkich obliczeń na najwyższym poziomie i logiki sterowania systemu zarządzania akumulatorem.
(2) Wykrywanie rezystancji izolacji: Cały układ akumulatorowy i układ wysokiego napięcia muszą zostać sprawdzone pod kątem izolacji przez system zarządzania akumulatorem.
(3) Wykrywanie blokady wysokiego napięcia (HVIL): służy do potwierdzenia integralności całego układu wysokiego napięcia. W przypadku uszkodzenia integralności obwodu układu wysokiego napięcia aktywowane są środki bezpieczeństwa.
jaFunkcja estymacji
(1) Oszacowanie SOC i SOH: sedno i najtrudniejsza część
(2) Równoważenie: wyrównuje się nierównowagę SOC x pojemność między monomerami za pomocą układu równoważącego.
(3) Ograniczenie mocy akumulatora: moc wejściowa i wyjściowa akumulatora jest ograniczona przy różnych temperaturach SOC.
jaInne funkcje
(1) Sterowanie przekaźnikiem: w tym główny +, główny-, przekaźnik ładowania +, przekaźnik ładowania -, przekaźnik wstępnego ładowania
(2) Kontrola termiczna
(3) Funkcja komunikacyjna
(4) Diagnostyka usterek i alarmowanie
(5) Działanie odporne na błędy
6.Architektura oprogramowania BMS
jaZarządzanie wysokim i niskim napięciem
Po normalnym włączeniu, BMS jest wybudzany przez VCU za pomocą sygnału 12 V na linii sztywnej lub CAN. Po zakończeniu autodiagnostyki i przejściu BMS w tryb czuwania, VCU wysyła polecenie wysokiego napięcia, a BMS steruje zamknięciem przekaźnika w celu nawiązania połączenia wysokiego napięcia. Po wyłączeniu zasilania, VCU wysyła polecenie niskiego napięcia, a następnie rozłącza wybudzanie 12 V. Po włożeniu pistoletu do ładowania w stanie wyłączonym, można go wybudzić sygnałem CP lub A+.
jaZarządzanie ładowaniem
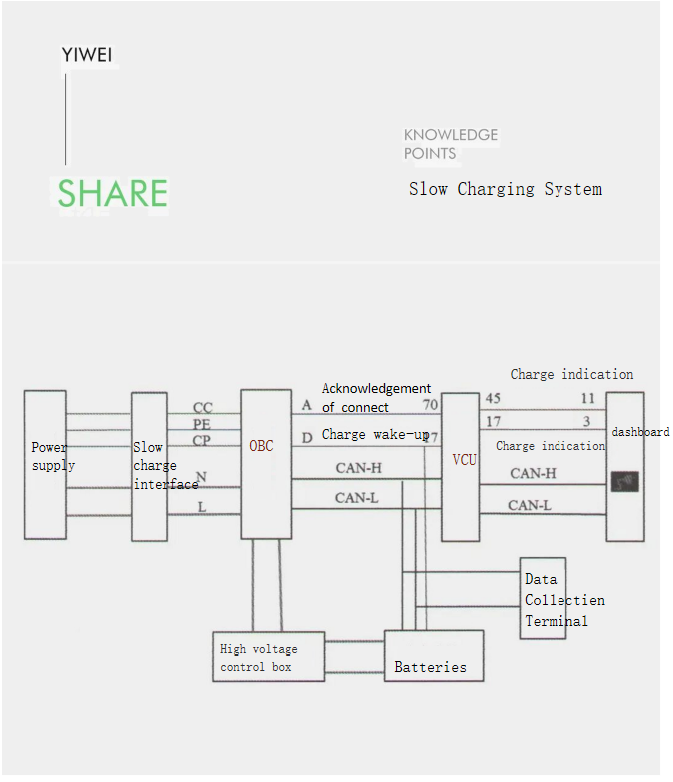
(1) Powolne ładowanie
Ładowanie wolne polega na ładowaniu akumulatora prądem stałym, który jest konwertowany z prądu przemiennego przez wbudowaną ładowarkę (lub zasilacz 220 V). Parametry prądu ładowania to zazwyczaj 16 A, 32 A i 64 A, a ładowanie może odbywać się również z domowej sieci elektrycznej. System BMS można wybudzić sygnałem CC lub CP, ale należy upewnić się, że po zakończeniu ładowania przejdzie on w tryb uśpienia. Proces ładowania prądem przemiennym jest stosunkowo prosty i można go opracować zgodnie ze szczegółowymi normami krajowymi.
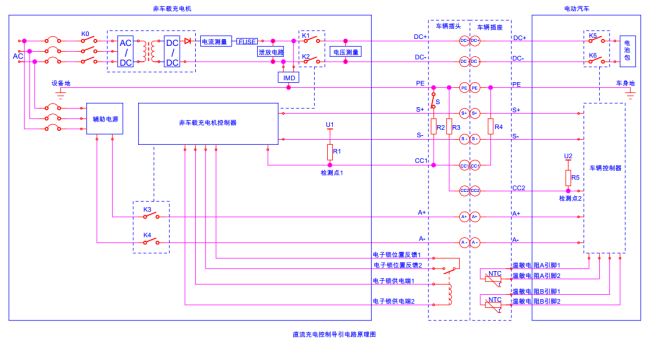
(2) Szybkie ładowanie
Szybkie ładowanie polega na ładowaniu akumulatora prądem stałym za pomocą stosu ładowania DC, co pozwala osiągnąć szybkość ładowania 1C lub nawet wyższą. Zazwyczaj 80% akumulatora można naładować w ciągu 45 minut. Ładowanie można uruchomić za pomocą sygnału A+ z pomocniczego źródła zasilania.
jaFunkcja estymacji
(1) SOP (State of Power) oblicza aktualną dostępną moc ładowania i rozładowywania akumulatora, wyszukując w tabelach temperaturę i stan naładowania (SOC). Jednostka VCU określa sposób wykorzystania całego pojazdu na podstawie przesłanej wartości mocy.
(2) SOH (State of Health) charakteryzuje przede wszystkim aktualny stan zdrowia akumulatora, przyjmując wartość od 0 do 100%. Przyjmuje się, że po spadku poziomu naładowania poniżej 80% akumulatora nie można używać.
(3) SOC (stan naładowania) należy do podstawowego algorytmu sterowania BMS, który charakteryzuje aktualny stan pozostałej pojemności. Opiera się on głównie na metodzie całki amperogodzinowej i algorytmie EKF (rozszerzonego filtru Kalmana), w połączeniu ze strategiami korekcji (takimi jak korekcja napięcia w obwodzie otwartym, korekcja pełnego naładowania, korekcja stanu naładowania, korekcja pojemności w różnych temperaturach i SOH itp.).
(4) Algorytm SOE (State of Energy) nie jest szeroko rozwijany przez krajowych producentów lub wykorzystuje stosunkowo proste algorytmy do obliczania stosunku pozostałej energii w danym stanie do maksymalnej dostępnej energii. Funkcja ta służy głównie do szacowania pozostałego zasięgu przelotowego.
jaDiagnostyka usterek
W zależności od stanu akumulatora rozróżnia się różne poziomy błędów, a w zależności od poziomu błędu, BMS i VCU podejmują różne środki przetwarzania, takie jak ostrzeżenia, ograniczenie mocy czy bezpośrednie odłączenie wysokiego napięcia. Do błędów zalicza się błędy akwizycji danych i racjonalności, błędy elektryczne (czujników i elementów wykonawczych), błędy komunikacji, błędy stanu akumulatora itp.
1.Podstawowe funkcje oprogramowania BMS
jaFunkcja pomiaru
(1) Pomiar podstawowych informacji: monitorowanie napięcia akumulatora, sygnału prądowego i temperatury akumulatora. Podstawową funkcją systemu zarządzania akumulatorem jest pomiar napięcia, prądu i temperatury ogniw akumulatora, co stanowi podstawę wszystkich obliczeń na najwyższym poziomie i logiki sterowania systemu zarządzania akumulatorem.
(2) Wykrywanie rezystancji izolacji: Cały układ akumulatorowy i układ wysokiego napięcia muszą zostać sprawdzone pod kątem izolacji przez system zarządzania akumulatorem.
(3) Wykrywanie blokady wysokiego napięcia (HVIL): służy do potwierdzenia integralności całego układu wysokiego napięcia. W przypadku uszkodzenia integralności obwodu układu wysokiego napięcia aktywowane są środki bezpieczeństwa.
jaFunkcja estymacji
(1) Oszacowanie SOC i SOH: sedno i najtrudniejsza część
(2) Równoważenie: wyrównuje się nierównowagę SOC x pojemność między monomerami za pomocą układu równoważącego.
(3) Ograniczenie mocy akumulatora: moc wejściowa i wyjściowa akumulatora jest ograniczona przy różnych temperaturach SOC.
jaInne funkcje
(1) Sterowanie przekaźnikiem: w tym główny +, główny-, przekaźnik ładowania +, przekaźnik ładowania -, przekaźnik wstępnego ładowania
(2) Kontrola termiczna
(3) Funkcja komunikacyjna
(4) Diagnostyka usterek i alarmowanie
(5) Działanie odporne na błędy
2.Architektura oprogramowania BMS
jaZarządzanie wysokim i niskim napięciem
Po normalnym włączeniu, BMS jest wybudzany przez VCU za pomocą sygnału 12 V na linii sztywnej lub CAN. Po zakończeniu autodiagnostyki i przejściu BMS w tryb czuwania, VCU wysyła polecenie wysokiego napięcia, a BMS steruje zamknięciem przekaźnika w celu nawiązania połączenia wysokiego napięcia. Po wyłączeniu zasilania, VCU wysyła polecenie niskiego napięcia, a następnie rozłącza wybudzanie 12 V. Po włożeniu pistoletu do ładowania w stanie wyłączonym, można go wybudzić sygnałem CP lub A+.
jaZarządzanie ładowaniem
(1) Powolne ładowanie
Ładowanie wolne polega na ładowaniu akumulatora prądem stałym, który jest konwertowany z prądu przemiennego przez wbudowaną ładowarkę (lub zasilacz 220 V). Parametry prądu ładowania to zazwyczaj 16 A, 32 A i 64 A, a ładowanie może odbywać się również z domowej sieci elektrycznej. System BMS można wybudzić sygnałem CC lub CP, ale należy upewnić się, że po zakończeniu ładowania przejdzie on w tryb uśpienia. Proces ładowania prądem przemiennym jest stosunkowo prosty i można go opracować zgodnie ze szczegółowymi normami krajowymi.
(2) Szybkie ładowanie
Szybkie ładowanie polega na ładowaniu akumulatora prądem stałym za pomocą stosu ładowania DC, co pozwala osiągnąć szybkość ładowania 1C lub nawet wyższą. Zazwyczaj 80% akumulatora można naładować w ciągu 45 minut. Ładowanie można uruchomić za pomocą sygnału A+ z pomocniczego źródła zasilania.
jaFunkcja estymacji
(1) SOP (State of Power) oblicza aktualną dostępną moc ładowania i rozładowywania akumulatora, wyszukując w tabelach temperaturę i stan naładowania (SOC). Jednostka VCU określa sposób wykorzystania całego pojazdu na podstawie przesłanej wartości mocy.
(2) SOH (State of Health) charakteryzuje przede wszystkim aktualny stan zdrowia akumulatora, przyjmując wartość od 0 do 100%. Przyjmuje się, że po spadku poziomu naładowania poniżej 80% akumulatora nie można używać.
(3) SOC (stan naładowania) należy do podstawowego algorytmu sterowania BMS, który charakteryzuje aktualny stan pozostałej pojemności. Opiera się on głównie na metodzie całki amperogodzinowej i algorytmie EKF (rozszerzonego filtru Kalmana), w połączeniu ze strategiami korekcji (takimi jak korekcja napięcia w obwodzie otwartym, korekcja pełnego naładowania, korekcja stanu naładowania, korekcja pojemności w różnych temperaturach i SOH itp.).
(4) Algorytm SOE (State of Energy) nie jest szeroko rozwijany przez krajowych producentów lub wykorzystuje stosunkowo proste algorytmy do obliczania stosunku pozostałej energii w danym stanie do maksymalnej dostępnej energii. Funkcja ta służy głównie do szacowania pozostałego zasięgu przelotowego.
jaDiagnostyka usterek
W zależności od stanu akumulatora rozróżnia się różne poziomy błędów, a w zależności od poziomu błędu, BMS i VCU podejmują różne środki przetwarzania, takie jak ostrzeżenia, ograniczenie mocy czy bezpośrednie odłączenie wysokiego napięcia. Do błędów zalicza się błędy akwizycji danych i racjonalności, błędy elektryczne (czujników i elementów wykonawczych), błędy komunikacji, błędy stanu akumulatora itp.
Skontaktuj się z nami:
yanjing@1vtruck.com +(86)13921093681
duanqianyun@1vtruck.com +(86)13060058315
liyan@1vtruck.com +(86)18200390258
Czas publikacji: 12 maja 2023 r.



